3D feature extraction and matching
Feature extraction and matching is a traditional method for shape matching and analysis. While various techniques have been proposed, this project attempts to apply machine learning techniques to evaluate the established point matches, leading true matches to be distinguished from outliers and more accurate underlying transformation parameters to be estimated. Such parameters will provide better initialization for the de facto iterative closest point (ICP) algorithm to refine.
Image Description:
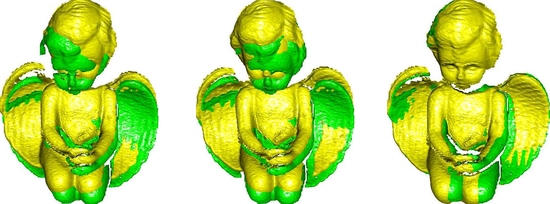
Two shapes in different colors were aligned by different methods. Left: SHOT; Middle: SHOT+RANSAC; SHOT+Learning